Un drone qui vole, roule et rampe, entièrement imprimable en 3D, avec caméra thermique, baie de fret et logiciel de contrôle intégré. C’est ce que l’équipe de Mercurius Tech a construit en un an. Et après avoir échoué à trouver des financements, elle a tout rendu public. Le projet Mercury est désormais open-source.
Un robot volant, roulant et rampant dans un seul châssis
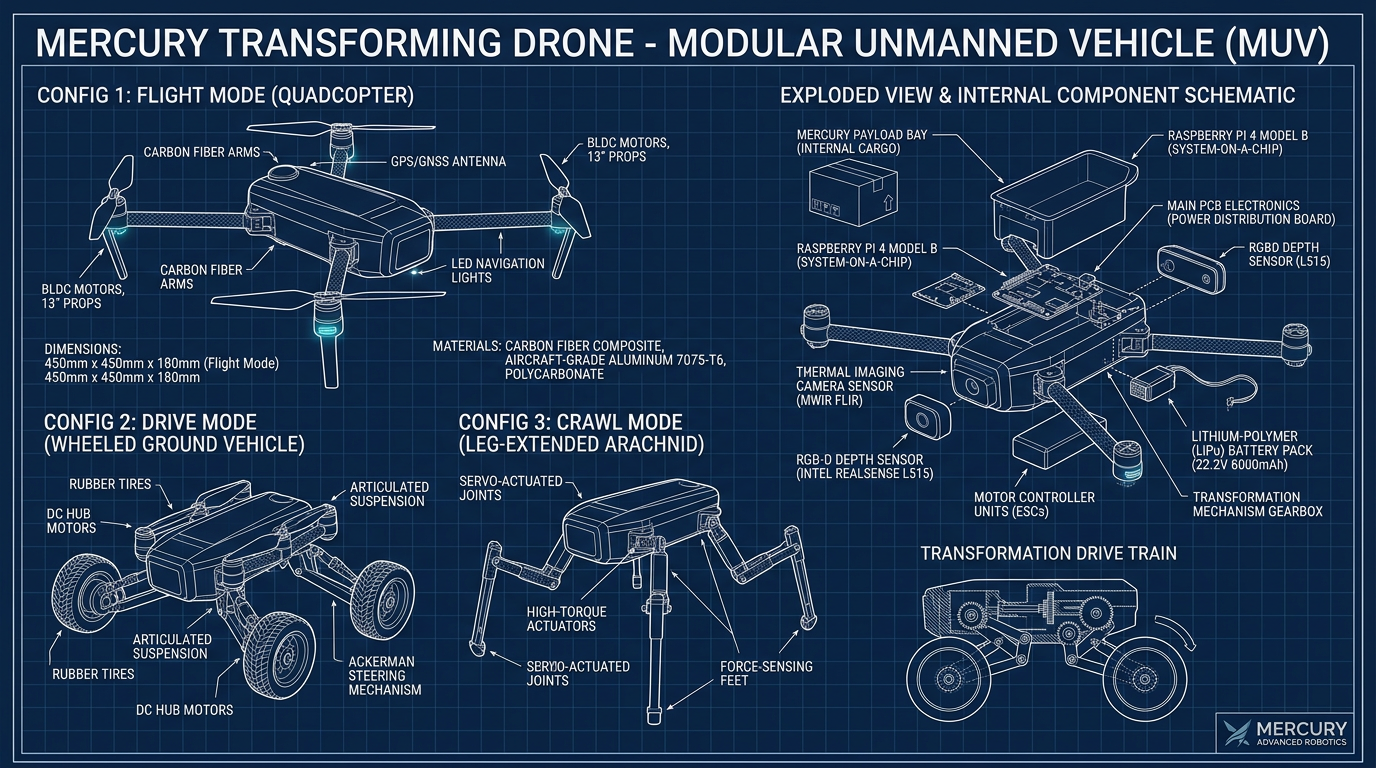
Mercury n’est pas un drone ordinaire. La machine développée par Alvaro L. et son équipe peut se transformer entre trois modes de déplacement distincts : le mode vol (quadricoptère classique), le mode roulé (véhicule terrestre sur roues) et le mode reptation (pattes déployées pour les surfaces accidentées).
La polyvalence ne s’arrête pas là. Le drone embarque une caméra standard, un capteur de profondeur, un capteur thermique, une baie de fret interne et une interface logicielle complète pour le piloter. Le tout tient dans un châssis imprimable sur n’importe quelle imprimante 3D grand public.
Concrètement, l’engin peut transporter de petits objets, inspecter des espaces confinés, basculer en mode terrestre pour économiser la batterie, et revenir en vol en quelques secondes. Le type de polyvalence que les secouristes attendent depuis longtemps d’un robot de reconnaissance.
Une startup qui n’a pas réussi à convaincre les investisseurs
L’histoire de Mercury est aussi celle d’une startup qui a failli. Après le succès viral du prototype, l’équipe a tenté de construire une entreprise autour du projet. Pompiers, équipes de recherche et sauvetage : l’intérêt des premiers répondants était réel. La technologie, elle, fonctionnait.
Mais les financements n’ont pas suivi. Ni les aides publiques, ni les business angels n’ont accepté de financer la R&D nécessaire pour pousser Mercury vers un produit commercial. Résultat : l’équipe a décidé de passer à autre chose, en laissant le projet accessible à tous.
« Nous pensons que c’était une technologie formidable », écrit Alvaro L. dans l’annonce Reddit. « Et nous avons vu que certains d’entre vous voulaient essayer de le construire, alors autant laisser le monde pouvoir fabriquer le sien. »
Tout est disponible sur GitHub
Le dépôt public publié le 7 mars contient l’intégralité du projet. Les fichiers STL pour l’impression 3D de toutes les pièces de l’assemblage. Les fichiers Gerber pour fabriquer les PCB électroniques. Le code source du logiciel d’autonomie. La liste complète du matériel nécessaire (BOM) et les instructions d’assemblage de base.
La stack technique repose sur un Raspberry Pi, un microcontrôleur ESP32, ainsi que des bibliothèques open-source comme ArduPilot, OpenCV et Leaflet pour la cartographie. Assez standard pour que n’importe quel maker expérimenté puisse reprendre le projet.
1/3 Have gotten a lot of requests for people who would like to build their own version of Mercury. So we decided to give the people what they want. We are officially open sourcing Mercury, now anyone can build their own transforming drone Voir sur X
Pourquoi c’est important
Le cas Mercury illustre une tension bien connue dans la robotique de terrain : les technologies les plus prometteuses pour les interventions d’urgence peinent à trouver un modèle économique viable. Les premiers répondants n’ont pas les budgets des industriels, et les investisseurs cherchent des marchés plus larges.
En open-sourcant Mercury, l’équipe offre aux labos universitaires, aux makers et aux entreprises de drones une base de travail solide. Les fichiers de simulation sont disponibles, le hardware est documenté, le code fonctionne. Quelqu’un reprendra peut-être le flambeau là où Mercurius Tech s’est arrêtée.
Le dépôt GitHub est disponible à l’adresse github.com/L42ARO/Mercury-Transforming-Drone.


