Un humanoïde à quatre bras conçu pour l’espace
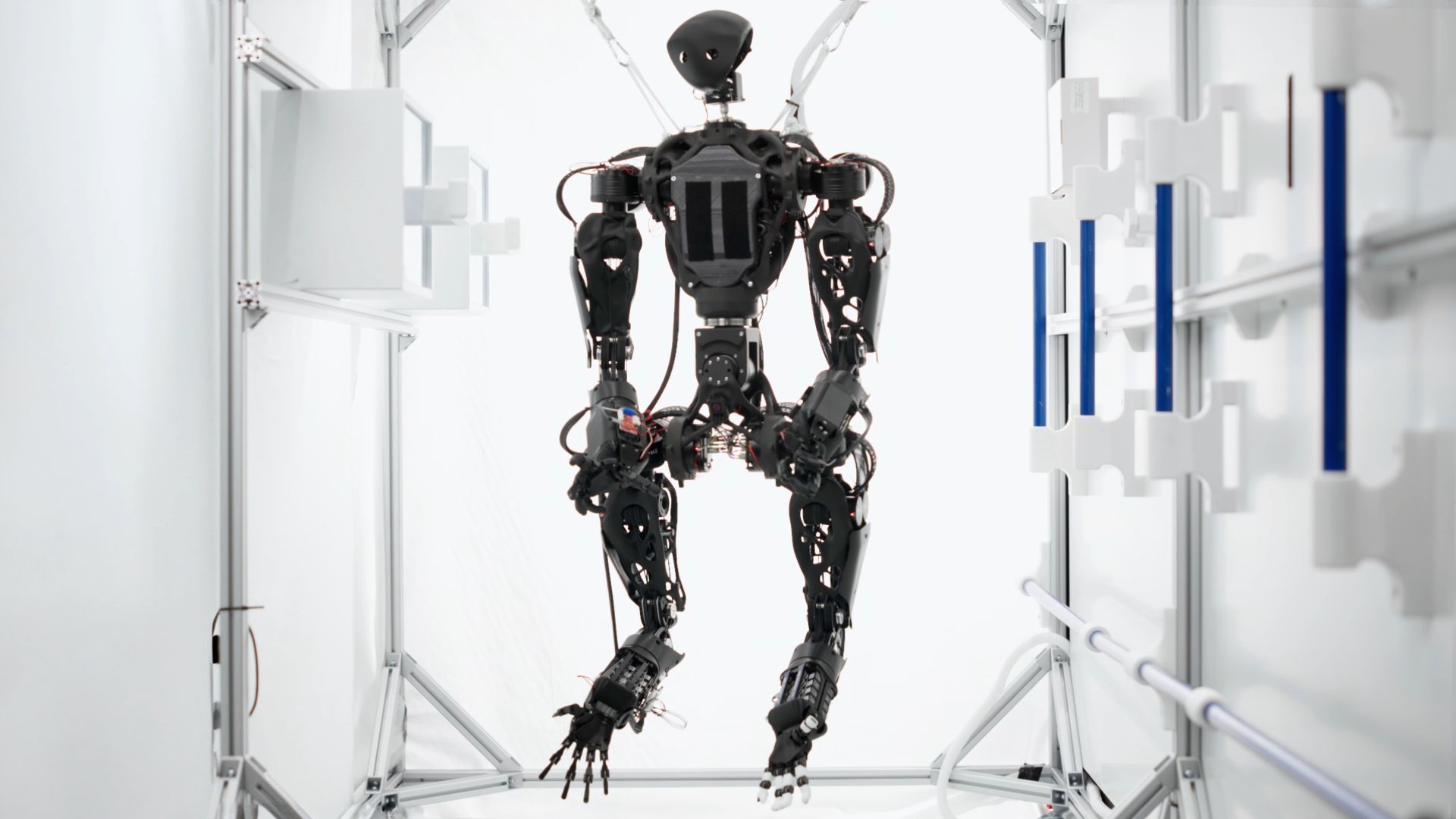
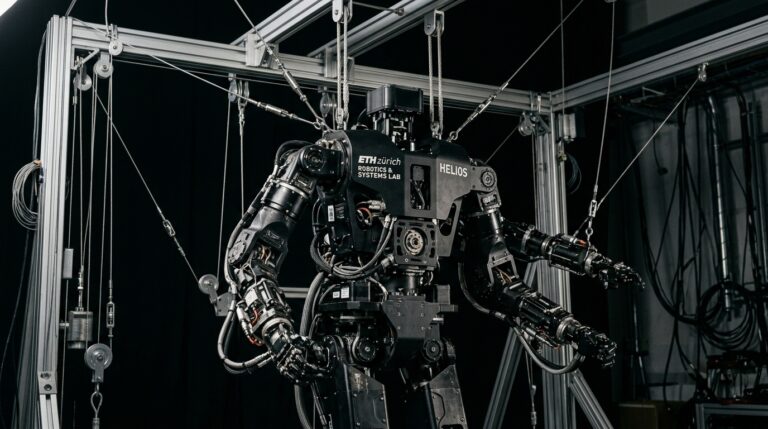
Orbit Robotics, une spin-off de l’ETH Zurich, a dévoilé fin mai 2026 son nouveau robot baptisé HELIOS. Concrètement, il s’agit d’un humanoïde dépourvu de jambes mais doté de quatre bras et quatre mains. L’idée part d’un constat simple : en orbite, les jambes ne servent à rien. Les astronautes se déplacent en s’agrippant aux parois et en stabilisant leur corps. Orbit a donc transposé cette logique sur sa machine.
Le châssis présenté en teaser vidéo expose une structure noire ajourée traversée de câbles, poulies et articulations cable-driven. Cette mécanique tendineuse remplace les actionneurs rigides habituels des bras industriels terrestres. Les moteurs sont placés près des épaules pour réduire la masse en mouvement, et la force est transmise par câbles et bobines jusqu’aux articulations distales.
Une réponse au coût exorbitant du travail astronaute
Le chiffre clé avancé par Orbit est éloquent : une heure de travail astronaute coûte environ 140 000 dollars. Or, les équipages des stations passent près de 35 % de leur temps sur des tâches de maintenance. Un seul cycle de déchargement de cargo mobilise environ 50 heures cumulées. HELIOS vise précisément ce créneau, à savoir prendre en charge l’inventaire, la manutention de fret, le rangement et les petites maintenances pour libérer les humains.
Le coude utilise une articulation à contact roulant qui favorise des mouvements souples et peu énergivores, tout en gardant rigidité et précision. Cette combinaison permet d’envisager des opérations délicates, comme manipuler des échantillons ou serrer des connecteurs, là où un bras industriel classique serait trop violent.
À lire sur ce robot
Applications et feuille de route
Sur le papier, HELIOS doit d’abord épauler les équipages des futures stations orbitales commerciales et des laboratoires en microgravité. Les premiers cas d’usage ciblés sont la gestion d’inventaire, le déchargement de cargo et le contrôle visuel d’équipements. À plus long terme, Orbit Robotics évoque le servicing de satellites et la construction orbitale, deux marchés en pleine structuration avec l’essor des plateformes privées.
En parallèle de HELIOS, l’équipe développe IKARUS, une plateforme robotique opérationnelle utilisée pour la téléopération, l’apprentissage par imitation et l’itération matérielle rapide. Construite en deux mois, elle sert de banc d’essai pour les algorithmes de manipulation bimanuelle qui équiperont à terme HELIOS. Le projet est porté depuis Zurich, avec un ancrage fort dans l’écosystème de l’ETH.