Tandis que des dizaines de robots humanoïdes performaient des danses traditionnelles lors du Gala du Nouvel An Chinois 2026, une chercheuse de l’Académie des Sciences de Chine a lancé une question dérangeante : ces robots ont-ils vraiment besoin de ressembler à des humains ?
La voix froide qui bouscule l’hype
Zhao Xiaoguang, chercheuse à l’Institut d’Automatisation de l’Académie des Sciences de Chine et membre du Comité National de la CPPC, a pris la parole lors des « Deux Sessions » de mars 2026. Son diagnostic est simple mais radical : ce qui compte dans un robot, c’est un « cerveau intelligent et des membres habiles ». Que la machine ressemble ou non à un être humain est, au fond, secondaire.
« La valeur de l’IA incarnée ne réside pas dans le chant ou la danse. Elle réside dans la capacité à s’adapter de manière autonome à un environnement, à prendre des décisions et à exécuter des tâches. »
Trois formes pour trois missions
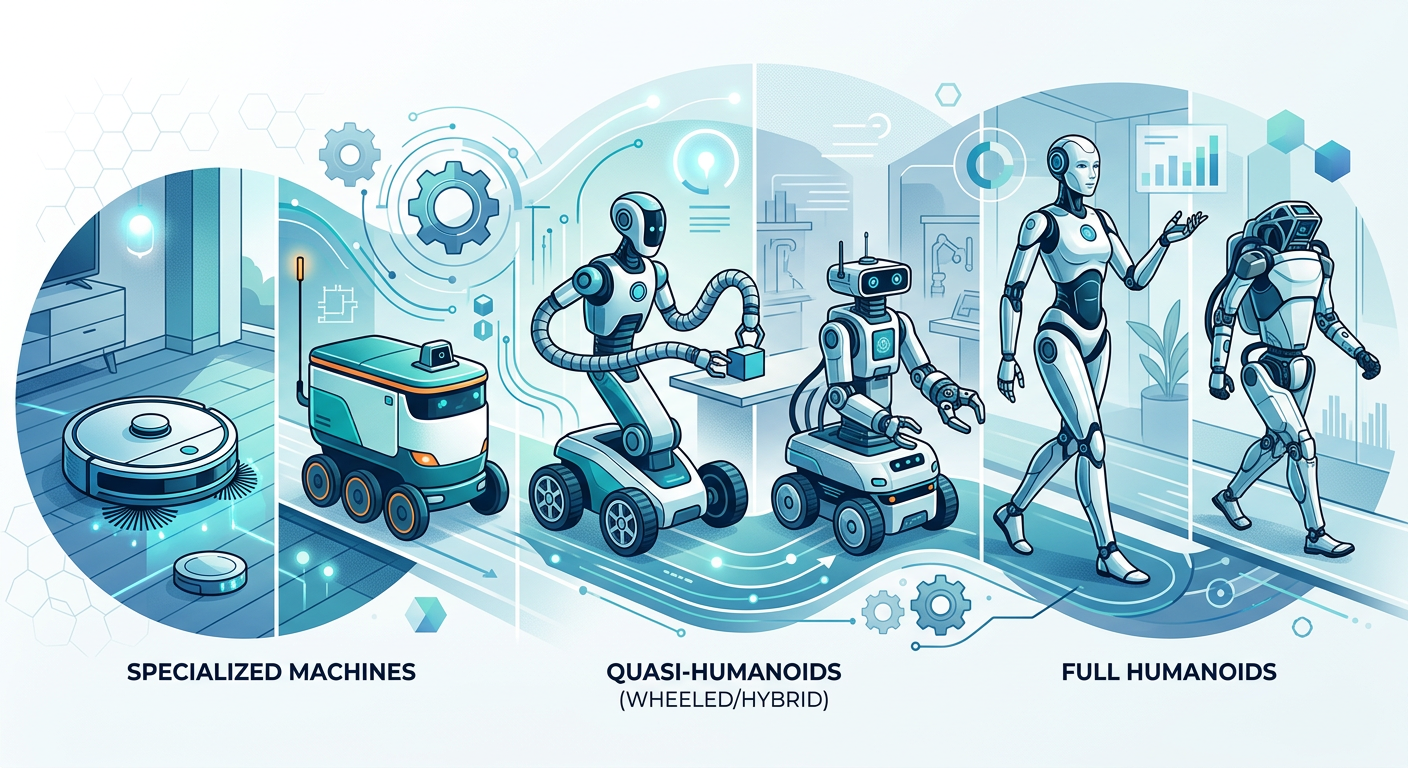
L’industrie converge vers un modèle de coexistence de formes différentes, chacune optimisée pour un usage précis :
- Robots spécialisés : cibles sur un scénario unique (nettoyage, livraison), priorité à l’efficacité pure.
- Quasi-humanoïdes : châssis à roues couplé à des bras robotiques, compromis entre efficacité et polyvalence opérationnelle.
- Humanoïdes complets : avantages en interaction sociale et adaptabilité spatiale, mais coûts élevés et algorithmes de contrôle complexes — pas toujours la solution optimale.
Ce constat remet en cause l’obsession de la « forme humaine » qui guide une partie importante des investissements en robotique depuis plusieurs années.
Le muscle contre le moteur : un défi physique fondamental
Zhao pointe un verrou technique souvent ignoré : « Un muscle peut s’arrêter à n’importe quel point de son mouvement. Un moteur, lui, ne peut s’arrêter qu’à des positions prédéfinies. » Forcer un robot à reproduire la cinématique du corps humain peut donc être contre-productif — voire technologiquement inefficace dans certains contextes.
Elle identifie cinq bottlenecks majeurs qui freinent le déploiement de l’IA incarnée, indépendamment de la forme choisie :
- Les capacités de perception, encore insuffisantes
- Les systèmes d’entraînement et structures mécaniques en retard sur la biologie
- Des vitesses de réaction trop lentes
- Des capacités de généralisation limitées
- Un raisonnement insuffisant dans les grands modèles
2026 : le pivot du « mode performance » vers le « mode travail »
Pour Zhou Yunjie, président de Haier Group et député au Parlement national, le principal goulot d’étranglement est ailleurs : « Le manque de coordination efficace entre le cerveau, le cervelet et les membres. » Une métaphore qui résume les défis d’intégration entre couches logicielles, traitement sensoriel et actuation physique.
L’industrie retient de ces débats une conclusion commune : 2026 est l’année pivot où l’IA incarnée doit passer du « mode performance » — démonstrations spectaculaires, galas, marathons — au « mode travail » — réduction des coûts, gains de productivité mesurables, déploiements pérennes.
Zhao conclut avec une projection raisonnée : dans les trois à cinq prochaines années, l’IA incarnée sera présente dans nos maisons, hôpitaux et espaces publics. Pas nécessairement sous forme humaine. Mais résolument utile.


