Fiche technique
À propos
Argus est un robot sphérique expérimental développé par le General Robotics Lab de Duke University, sous la direction du professeur d’ingénierie Boyuan Chen. Présenté en mai 2026 dans la revue Science Robotics, il rompt avec la tradition biomimétique en abandonnant l’idée d’imiter le vivant : ni humanoïde, ni quadrupède, ni véhicule à roues.
Conception
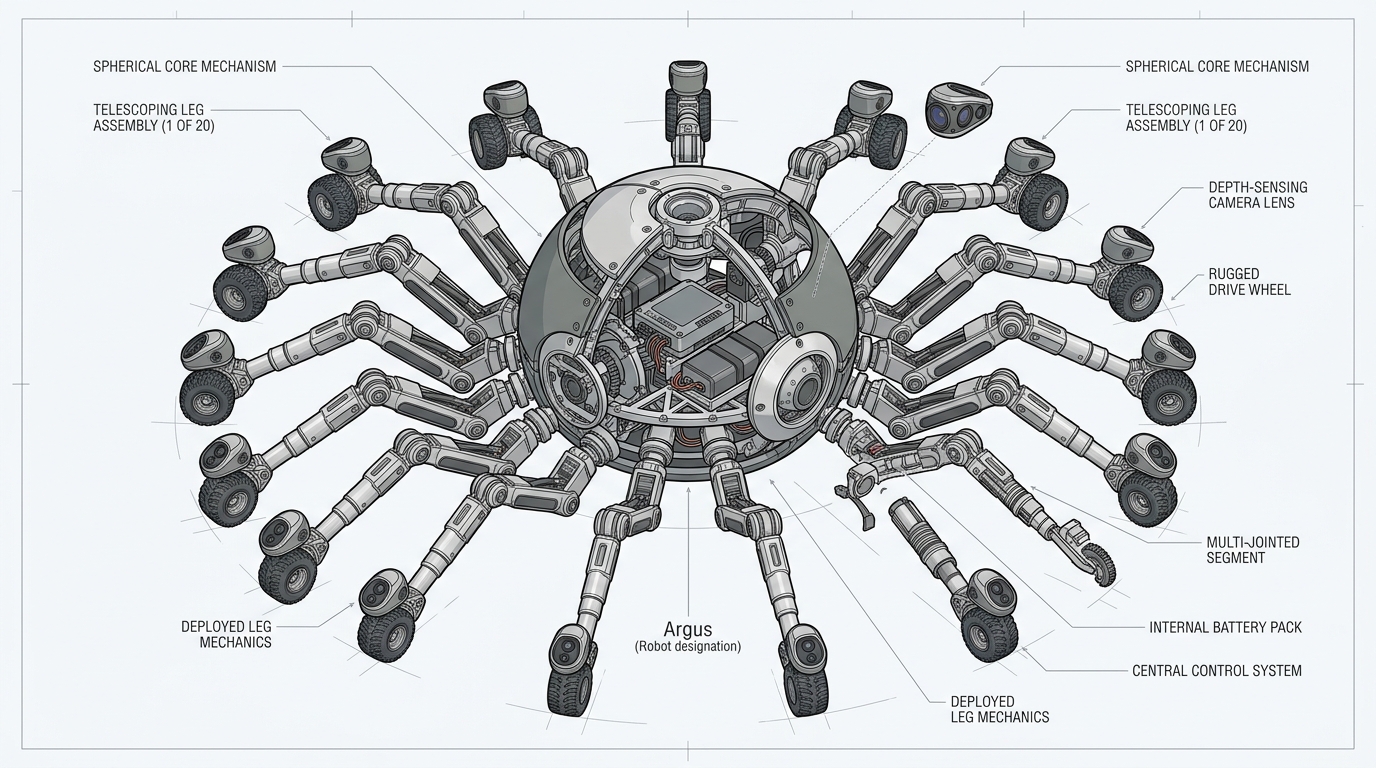
Le robot prend la forme d’une sphère compacte d’où rayonnent vingt pattes télescopiques. Chaque patte est motorisée indépendamment et porte à son extrémité une caméra de profondeur. Cette disposition radiale permet à Argus de voir et de se déplacer instantanément dans toutes les directions, sans avoir besoin de pivoter pour faire face à sa cible. Le robot n’a ni avant, ni arrière, ni haut, ni bas.
Isotropie dynamique
Pour décrire l’innovation, l’équipe de Duke a introduit une nouvelle métrique baptisée isotropie dynamique, qui évalue de 0 à 1 la capacité d’un robot à accélérer uniformément dans toutes les directions. La plupart des robots actuels, humanoïdes compris, plafonnent en dessous de 0,6. Argus atteint 0,91, un score qui justifie selon Chen une nouvelle approche du design robotique.
Capacités
Argus a été testé en environnement réel : plages sablonneuses, sous-bois forestiers, ascension entre deux murs de briques en alternant contraction et extension de pattes. Le robot encaisse les chocs et continue de fonctionner même quand une patte casse ou qu’un moteur tombe en panne. Cette redondance native est intrinsèque à son architecture.
📰 Dans l’actualité
Applications envisagées
Les chercheurs de Duke voient Argus comme une plateforme pour la recherche et le sauvetage, les véhicules autonomes sous-marins ou aériens, et même comme préhenseur capable de manipuler des objets dans n’importe quelle direction. Le robot reste à ce jour un prototype académique sans plan de commercialisation annoncé, mais son design ouvre une nouvelle voie pour la robotique de locomotion.
Pour aller plus loin, lire notre article : Duke dévoile Argus, un robot sphérique à 20 pattes télescopiques.
Applications
Recherche et sauvetage, manipulation omnidirectionnelle, exploration sous-marine et aérienne