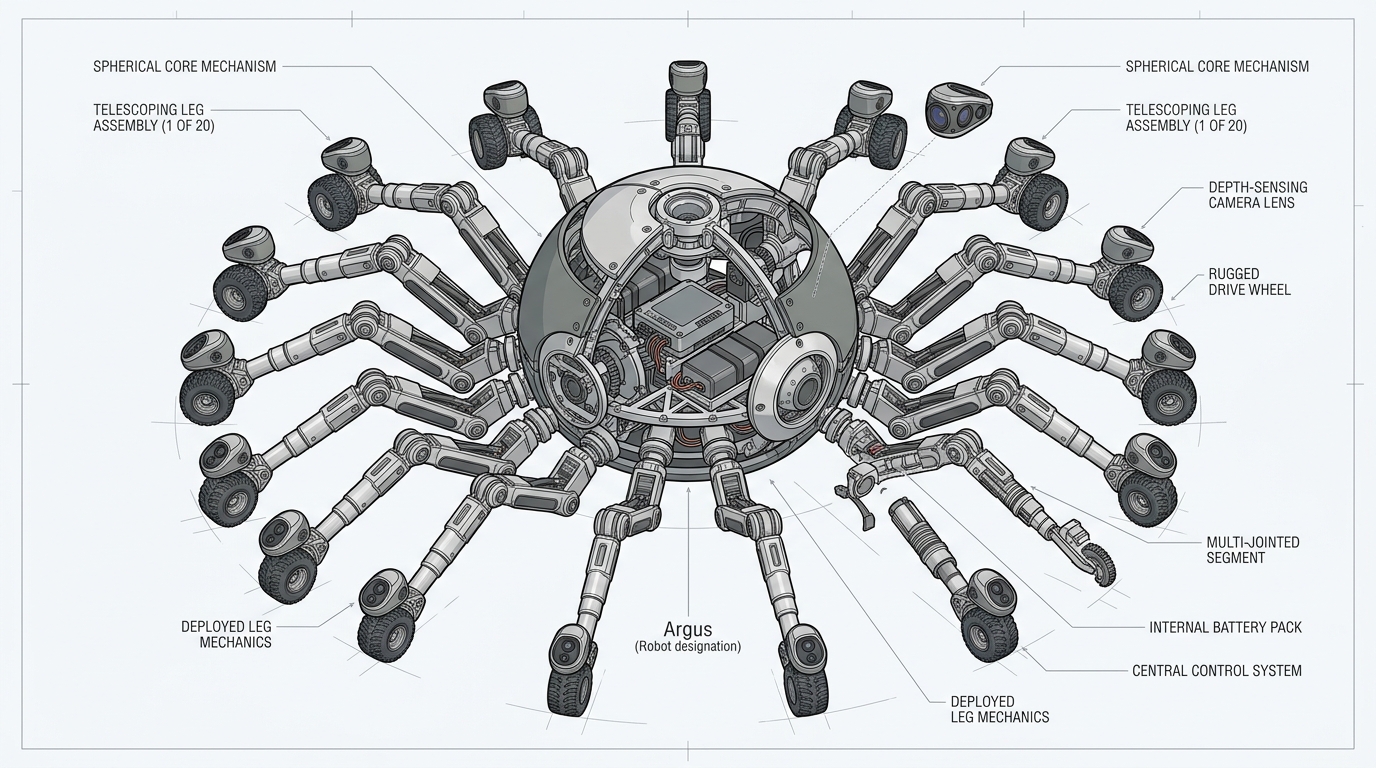
L’équipe de Boyuan Chen, professeur d’ingénierie à l’université Duke, vient de présenter Argus, un robot sphérique qui rompt avec quarante ans de bionique en robotique. Pas de jambes, pas de roues, pas de bras articulés à la manière d’un humanoïde. Vingt pattes télescopiques qui rayonnent depuis un cœur central, chacune équipée d’une caméra de profondeur. L’étude paraît cette semaine dans Science Robotics, et elle propose un changement de paradigme assumé : arrêter de copier la nature, et concevoir des machines qui se déplacent uniformément dans toutes les directions.
Une boule à 20 yeux qui n’a ni avant ni arrière
Argus mesure quelques dizaines de centimètres de diamètre quand ses pattes sont rétractées, et atteint plus du double quand elles s’étendent. Le nom est emprunté à la mythologie grecque, plus précisément au géant aux multiples yeux. Le robot peut voir et se déplacer instantanément dans n’importe quelle direction parce qu’il n’a pas de face avant à orienter. « On a arrêté de mesurer comment vos jambes sont disposées autour de votre corps, on mesure à quelle vitesse vous pouvez vous déplacer dans n’importe quelle direction », résume Chen dans l’article de l’Associated Press.
Concrètement, chaque patte est motorisée individuellement. Quand le robot doit avancer dans une direction donnée, il ne pivote pas pour faire face à sa cible. Il choisit simplement les pattes qui poussent et celles qui se rétractent, et la sphère roule sans changer d’orientation. Si une patte casse ou si un moteur tombe en panne, Argus continue de bouger sans interruption. Une redondance native qui n’existe pas chez les robots à deux ou quatre pattes.
L’isotropie dynamique : une nouvelle métrique pour la robotique
Pour formaliser leur approche, les chercheurs proposent un indice baptisé isotropie dynamique. La métrique évalue de 0 à 1 la capacité d’un robot à accélérer de manière uniforme dans toutes les directions. Les humanoïdes, les drones et la plupart des robots quadrupèdes plafonnent en dessous de 0,6 parce qu’ils sont conçus pour un axe de marche privilégié. Argus atteint 0,91. Pour Chen, c’est ce score qui change tout : « Quand un robot peut accélérer aussi bien dans toutes les directions, il n’a plus besoin de faire face au monde d’une certaine manière. »
Les expérimentations ont eu lieu sur des terrains réputés difficiles pour la robotique de locomotion. Des plages sablonneuses, des sous-bois forestiers, des passages entre deux murs de briques où Argus alterne contraction et extension de pattes pour grimper en s’appuyant sur les parois. Le robot encaisse les chocs, se stabilise après une poussée et continue sa progression même quand plusieurs pattes sont neutralisées. Jiaxun Liu, doctorante et co-autrice de l’étude, résume : « La première fois qu’on l’a vu naviguer entre les arbres et sur un terrain accidenté, même sous des collisions violentes, on a compris qu’on tenait quelque chose de différent. »
Recherche et sauvetage, manipulation, exploration sous-marine
Les premières applications visées par Duke sortent du cadre classique des humanoïdes industriels qui occupent l’actualité depuis dix-huit mois. L’équipe pense à des robots de recherche et de sauvetage capables de progresser dans des décombres sans avoir besoin de planifier un trajet, à des véhicules sous-marins ou aériens qui n’auraient plus à pivoter pour changer de cap, et à des préhenseurs qui pourraient manipuler des objets sans rotation préalable.
L’idée la plus inhabituelle est sans doute celle d’utiliser Argus comme une main. « Au lieu de construire une main robotique qui ressemble à une main humaine, une idée est de penser à Argus comme étant la main elle-même, capable de manipuler des objets dans n’importe quelle direction », explique Chen. Le pari est risqué dans un marché qui investit massivement dans la dextérité biomimétique avec des entreprises comme Sharpa, Linkerbot ou Agilink. Mais il propose une alternative philosophique : et si la prochaine génération de robots ne ressemblait à rien de connu ?
Argus reste un prototype académique, sans plan de commercialisation annoncé. Mais l’article dans Science Robotics ouvre une discussion qui dépasse le simple gadget : la robotique a-t-elle besoin de continuer à copier le vivant, ou peut-elle inventer ses propres formes ? La réponse de Duke est claire. Et elle pourrait inspirer les prochaines vagues d’embodied AI bien au-delà du campus de Durham.
Source : Associated Press



