« On ne peut pas atteindre l’AGI à coups de fine-tuning. » C’est avec cette formule que Bernt Børnich, PDG de 1X, a annoncé le lancement du 1X World Model Lab. L’objectif affiché : accélérer la route vers des robots humanoïdes pleinement autonomes. Pour diriger ce nouveau laboratoire, 1X a recruté Sam Sinha, chercheur fondateur de la start-up de génération vidéo Luma AI, au poste de responsable des modèles du monde.
Une suite logique du World Model lancé en janvier
Le laboratoire prolonge le 1X World Model, ce modèle de fondation lancé en janvier de cette année. Construit sur des données vidéo, il permettait à Neo, l’humanoïde de 1X, de transformer une consigne en action, y compris sur des objets jamais rencontrés. L’entreprise passe désormais à une phase de production réelle des robots et se rapproche d’une livraison à grande échelle. Résultat : beaucoup plus de données deviennent disponibles, et la mission du lab est de transformer ce flux croissant en robots de plus en plus intelligents.
Le pari des données dès la première étape
Børnich défend une thèse simple. Chaque grand bond de l’IA des cinq dernières années est venu de l’ajout de types de données plus riches, dans le bon ordre. Le texte d’abord, parce qu’il en existe un lac inépuisable en ligne. Puis le texte et l’image, ensuite le texte et la vidéo. L’erreur, selon lui, consiste à traiter les données robotiques comme une réflexion après coup, une fine couche d’ajustement greffée sur un modèle pré-entraîné sur tout le reste.
Sam Sinha, qui a passé quatre ans à faire passer à l’échelle des modèles multimodaux chez Luma, va dans le même sens. La robotique a trop longtemps été traitée comme « un citoyen de seconde zone », estime-t-il. La plupart des entreprises d’humanoïdes entraînent leurs modèles sur des données web puis les affinent sur une centaine d’heures de démonstrations robotiques. « Ce principe est fondamentalement cassé. Il faut voir ses tokens les plus importants dès l’étape zéro. » Sa formule pour résumer le poste : « De bons tokens en entrée, de bons tokens en sortie. »
Pourquoi Neo génère des données uniques
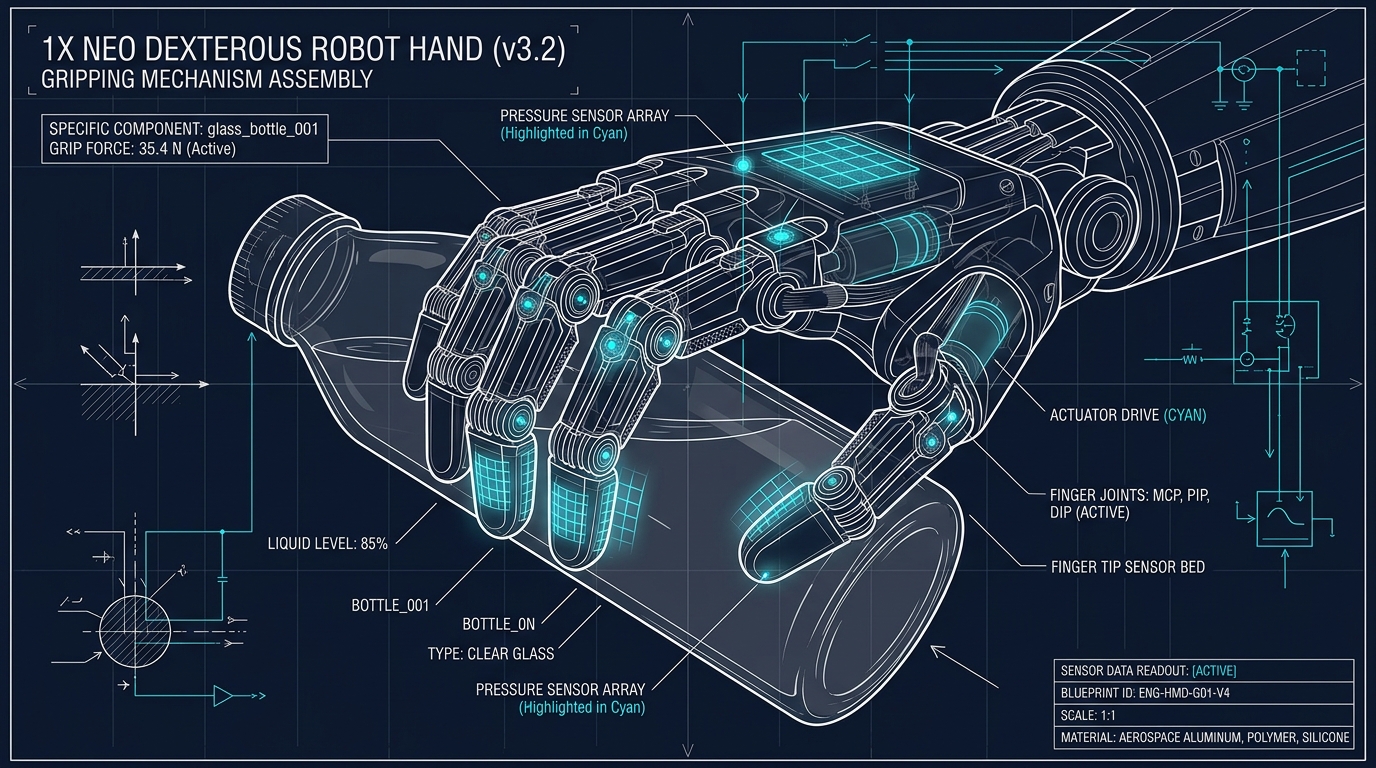
L’atout de 1X tient à ses robots déployés sur le terrain. Quand des machines accomplissent des tâches chaque jour dans le monde réel, le flux de données d’entraînement devient extrêmement diversifié et riche. Ce n’est plus seulement de la vidéo, du texte ou des images. S’y ajoutent le flux visuel en direct, l’information proprioceptive sur la position des articulations de Neo et les forces qui s’exercent sur elles, ainsi que les données de pression et de force remontées par les mains du robot.
Comme le résume Sinha, l’écart entre saisir une bouteille juste assez fort pour la soulever et pas assez fort est « énorme », et une caméra seule ne pourra jamais le capturer. C’est tout l’enjeu de ce laboratoire : nourrir le modèle de fondation avec ces signaux physiques que les robots concurrents, entraînés surtout sur de la vidéo, ne possèdent pas. 1X mise sur cette boucle de rétroaction pour creuser l’écart à mesure que Neo arrive dans les foyers.