Un robot humanoïde coûte souvent plus cher qu’une voiture. Hugging Face veut casser cette barrière avec LeRobot Humanoid, une plateforme bipède open source que l’on imprime en 3D pour environ 2 500 dollars.
Un humanoïde que l’on construit, répare et modifie soi-même
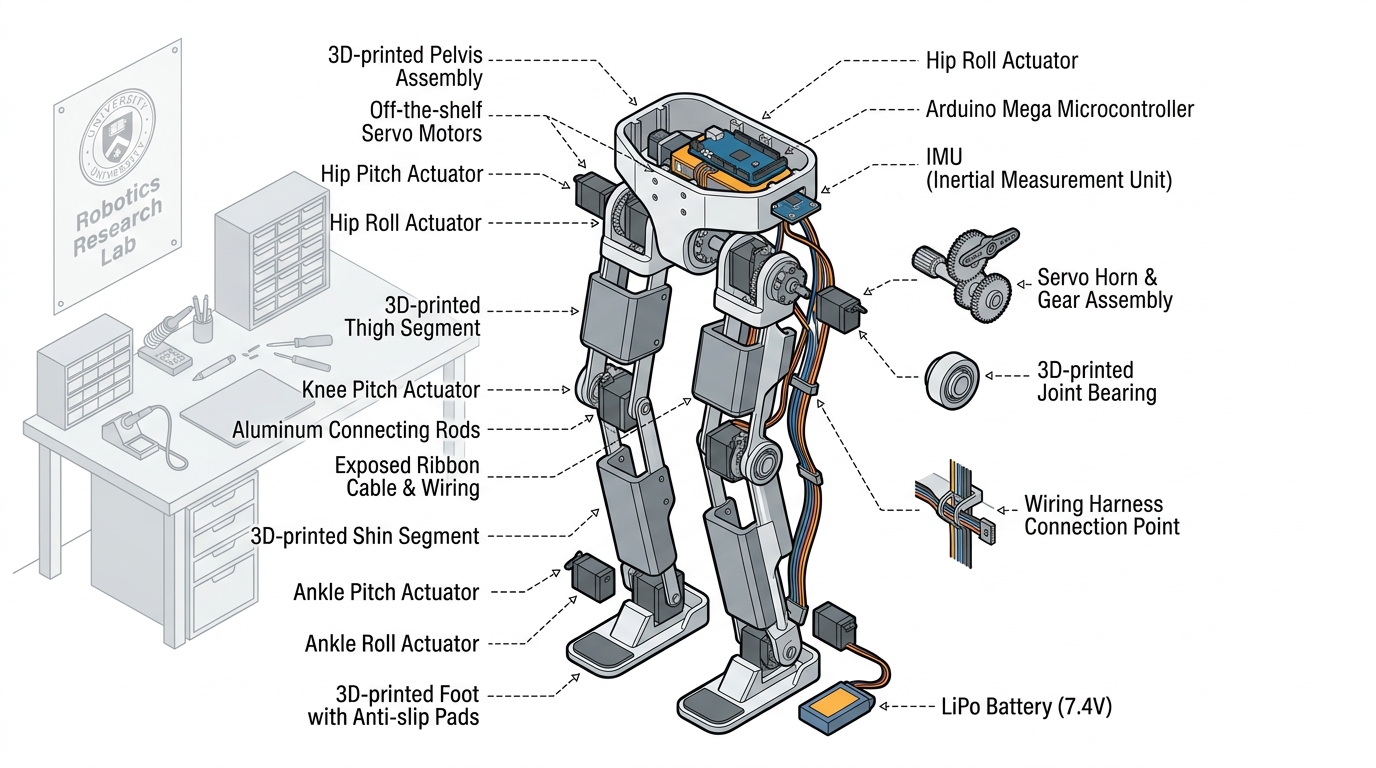
Pour l’instant, LeRobot Humanoid se résume à une paire de jambes capable de tenir debout et de marcher. Le projet cible les chercheurs, les étudiants et les makers qui veulent un robot qu’ils peuvent assembler, comprendre et réparer eux-mêmes. Hugging Face ne livre pas un produit grand public fini, mais ce qu’elle décrit comme une plateforme DIY complète.
Le kit ne se limite pas au matériel. L’équipe fournit les plans, les schémas de câblage, les outils de simulation, les utilitaires de calibration et les environnements d’entraînement de modèles. Tout est pensé pour qu’un utilisateur puisse partir de zéro et arriver à un robot fonctionnel.
Des pièces imprimées et des composants standard
La structure repose principalement sur des pièces imprimées en 3D, associées à de l’électronique du commerce et des actionneurs abordables. L’objectif est la reproductibilité. Si une pièce casse, on la réimprime. Si un choix de conception pose problème, on le révise et on le teste sans attendre une commande de pièce sur mesure.
Concrètement, cette approche transforme la machine en terrain d’expérimentation. Le coût reste un frein pour le grand public, mais 2 500 dollars pour une base humanoïde complète place le projet bien en dessous des modèles de laboratoire habituels.
Réduire l’écart entre simulation et réalité
Le vrai enjeu technique est ailleurs. Les comportements appris en simulation échouent souvent une fois transférés sur le matériel réel. C’est l’un des obstacles les plus tenaces de la robotique. LeRobot Humanoid tente d’y répondre en reliant dans un même flux les outils de conception, les environnements de simulation, la collecte de données réelles et l’identification des paramètres.
Le projet est réparti sur plusieurs dépôts. Chacun couvre une partie du pipeline : co-conception mécanique et contrôle, documentation matérielle, modèles 3D du robot, déploiement et identification par simulation. Un dépôt baptisé lerobot-legged-zoo propose des environnements d’entraînement pour développer et évaluer des politiques de locomotion avant de risquer le matériel.
Résultat : Hugging Face étend au monde physique la logique open source qui a fait son succès dans les modèles d’IA. La plateforme reste expérimentale, mais elle donne aux laboratoires universitaires un point de départ commun, là où chacun devait jusqu’ici tout reconstruire.
Source : Hugging Face, Hackster.io