Le laboratoire de robotique douce de l’ETH Zurich vient de publier trois nouveaux modèles de mains robotiques open-source. Le projet ORCA (Open-source Reliable Cost-effective Anthropomorphic) franchit une nouvelle étape avec des capteurs tactiles intégrés sur chaque bout de doigt, disponibles gratuitement sur GitHub et imprimables en 3D.
L’annonce, faite le 15 mars 2026 par le compte officiel @orcahand, a généré plus de 1600 interactions en quelques heures. Lukas Ziegler, chercheur senior au sein du projet, parle d’une mission claire : « démocratiser la dextérité robotique ».
Ce que les nouveaux modèles apportent concrètement
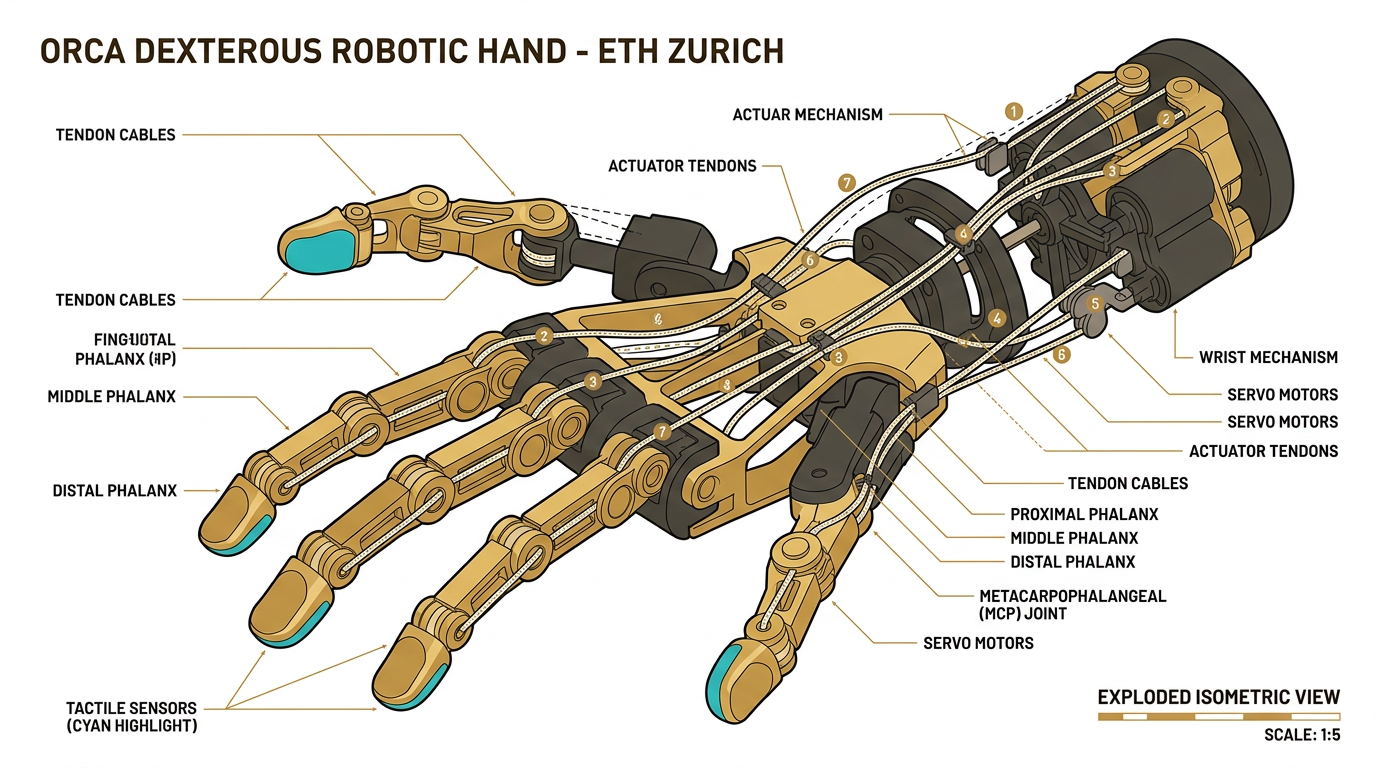
Les trois nouvelles mains ORCA reprennent la base du modèle v1 (17 degrés de liberté, actionnement par tendons) mais y ajoutent des capteurs tactiles sur les bouts des doigts. Concrètement, le robot peut maintenant « sentir » la pression et les textures, ce qui ouvre la voie à des tâches de manipulation fine : ramasser une pièce de monnaie, utiliser des baguettes, tenir un stylo.
Le coût de fabrication reste sous les 2000 francs suisses (environ 2100 euros). La structure entière est imprimable avec une imprimante 3D standard. L’assemblage complet prend moins de huit heures. Tous les fichiers STL, le code de contrôle, les listes de pièces et les tutoriels sont disponibles sur orcahand.com/dashboard.
La main ORCA v1 en action au laboratoire de robotique douce de l’ETH Zurich.
Pourquoi la dextérité est le verrou principal des humanoïdes
Les jambes des robots humanoïdes progressent vite. Les bras aussi. Mais les mains restent le goulot d’étranglement. Les systèmes commerciaux capables de se rapprocher des capacités humaines coûtent facilement 20 000 à 50 000 euros par unité, et nécessitent une maintenance spécialisée. Résultat : la majorité des équipes de recherche travaillent sans vraies mains, ou avec des préhenseurs simplifiés à deux doigts.
ORCA attaque ce problème par la base. Les joints sont conçus pour se déboîter sans casser en cas de surcharge (protection mécanique passive). Un système d’autocalibration évite les dérives au fil du temps. Et la conception modulaire permet de remplacer un doigt en quelques minutes.
Un outil pour la recherche en IA physique
Le projet ORCA cible explicitement la communauté de recherche en imitation learning et reinforcement learning. Les résultats publiés dans le papier original (arXiv 2504.04259) montrent qu’ORCA supporte le sim-to-real zero-shot : une politique entraînée en simulation peut être transférée directement sur la main physique sans réentraînement. Sur 10 000 cycles d’opération continue, aucune défaillance matérielle n’a été observée.
Avec la sortie de trois nouveaux modèles incluant le retour tactile, l’équipe de l’ETH Zurich s’inscrit dans la dynamique ouverte qui transforme la robotique en 2026. Boston Dynamics, Figure, Unitree misent sur des systèmes propriétaires. ORCA parie sur la communauté.

