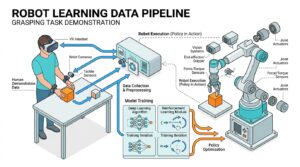
Des chercheurs de l’Université Tsinghua, de Peking University et de Galbot ont publié LATENT (Learning Athletic Humanoid Tennis Skills), un framework qui permet au robot humanoïde Unitree G1 de jouer au tennis en apprenant directement depuis des données de capture de mouvement humain. Taux de réussite au coup droit : 90,9 %. Vitesse de balle gérée : 15 m/s et plus.
Apprendre du mouvement humain, pas d’une simulation parfaite
La particularité de LATENT tient dans l’adjectif « imperfect » du titre. Les données de mouvement utilisées pour entraîner le robot sont brutes, non nettoyées, issues de captures réelles de joueurs de tennis. En robotique, entraîner un système sur des données imparfaites est un vrai défi : les petites erreurs de capture se transforment en comportements instables sur le robot physique.
L’équipe a développé une méthode de sim-to-real transfer robuste qui corrige ces imperfections pendant l’entraînement. Le Unitree G1 ne dispose d’aucune caméra embarquée ni de modèle de vision : il s’appuie entièrement sur un système externe de capture de mouvement (MoCap) pour localiser la balle et le court. Cela limite les déploiements possibles, mais simplifie considérablement la boucle de contrôle du robot.
Des échanges multi-coups réels avec des joueurs humains
Les résultats en conditions réelles dépassent ce que l’on avait vu jusqu’ici. Le Unitree G1 peut soutenir des échanges multi-coups avec des joueurs humains, encaisser des balles à plus de 54 km/h et les renvoyer de manière contrôlée. Le coup droit atteint 90,9% de réussite dans les tests standardisés. Le revers et d’autres coups ont également été validés, bien qu’avec des taux légèrement inférieurs.
Concrètement, le robot se déplace, ajuste son équilibre, pivote sur ses hanches et frappe la balle dans un geste proche de celui d’un joueur humain débutant. Le tout sans qu’une seule ligne de code définisse « comment frapper un coup droit » : c’est le résultat direct de l’imitation learning depuis les données humaines.
Pourquoi c’est plus important que le ping-pong
Les vidéos de robots humanoïdes jouant au ping-pong circulent depuis 2025. Mais le tennis impose des contraintes physiques bien plus sévères : distances de déplacement plus grandes, puissance de frappe plus élevée, gestion de l’équilibre sur des mouvements amples. Réussir au tennis requiert une coordination corps entier que le ping-pong ne teste pas vraiment.
Pour les chercheurs, l’enjeu n’est pas sportif. LATENT démontre qu’un humanoïde peut acquérir des compétences athlétiques complexes en s’appuyant sur des données humaines imparfaites, ce qui ouvre des perspectives directes pour des tâches industrielles dynamiques : manipulation rapide, assemblage en cadence, manutention de pièces en mouvement.
Le code est disponible sur GitHub (GalaxyGeneralRobotics/LATENT) et la page projet à l’adresse zzk273.github.io/LATENT.