Entraîner un robot humanoïde à saisir un objet délicat ou à traverser un terrain irrégulier demande des milliers d’heures de simulation. NVIDIA a annoncé lors de sa conférence GTC 2026 la disponibilité générale de Newton 1.0, son moteur de simulation physique open-source conçu spécifiquement pour la robotique. Le résultat : une accélération spectaculaire des cycles d’entraînement, avec des gains de 252 fois pour la locomotion et de 475 fois pour les tâches de manipulation.
Un simulateur conçu pour la vitesse et le réalisme
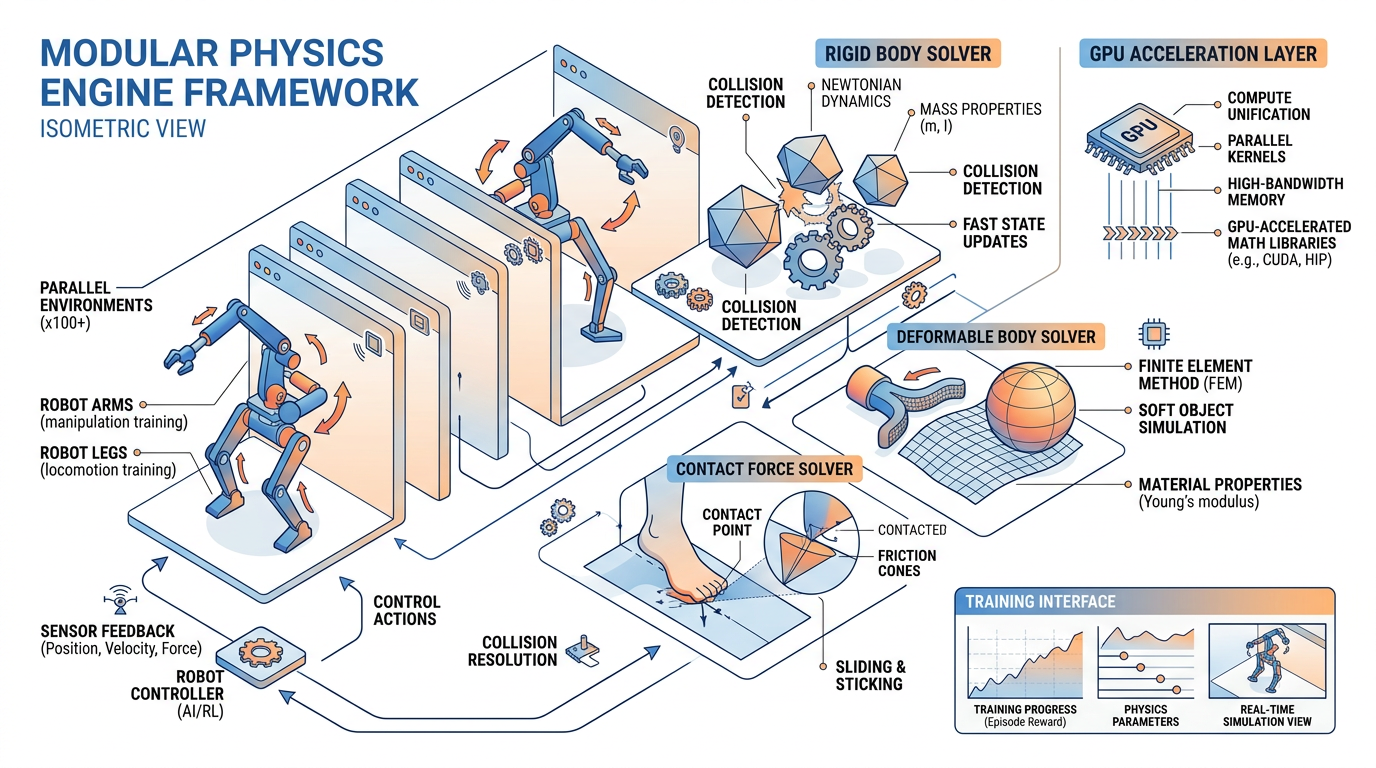
La plupart des moteurs de simulation font un compromis entre précision physique et vitesse d’exécution. Newton est conçu pour ne pas choisir. Construit sur NVIDIA Warp et le standard OpenUSD, il s’appuie sur l’accélération GPU pour faire tourner des milliers d’environnements de simulation en parallèle.
Concrètement, Newton intègre deux moteurs complémentaires. MuJoCo Warp, développé par Google DeepMind, apporte la stabilité et la précision que la communauté robotique lui reconnait depuis des années, tout en bénéficiant d’une mise à l’échelle GPU. Kamino, développé par Disney Research, prend en charge les mécanismes complexes comme les mains robotiques, les systèmes à pattes et les liaisons à boucles fermées, qui étaient jusqu’ici difficiles à simuler fidèlement.
Compatible avec tous les formats standards
Newton prend en charge les formats de description de robots les plus courants : MJCF, URDF et OpenUSD. Les équipes peuvent changer de solveur sans réécrire leur pipeline de développement. Le simulateur s’intègre nativement avec NVIDIA Isaac Lab et Isaac Sim, les outils de référence pour l’entraînement de robots chez de nombreuses entreprises du secteur.
L’une des nouveautés de la version 1.0 est aussi la simulation de corps déformables : cables, textiles souples et pièces en caoutchouc peuvent désormais être simulés avec précision. Pour les robots qui manipulent des objets mous ou des emballages, c’est un gain considérable.
Pourquoi c’est important
La rapidité d’entraînement est le goulot d’étranglement principal du secteur. Un robot qui mettait trois semaines à apprendre une tâche dans un simulateur lent peut désormais la maîtriser en quelques heures. Pour les entreprises qui veulent déployer des flottes de robots humanoïdes, réduire ce délai change fondamentalement l’équation économique.
Newton est disponible en open-source sur GitHub. La version 1.0 GA marque le passage d’un outil de recherche à une infrastructure de production, avec une API stable et un support pour les workflows de reinforcement learning à grande échelle.
Source : NVIDIA Developer Blog, 17 mars 2026