Physical Intelligence (PI), la startup robotique de San Francisco valorisée à 2,4 milliards de dollars, a publié le 3 mars 2026 une avancée majeure sur la mémoire de ses robots. Le nouveau système MEM (Multi-Scale Embodied Memory) permet d’enchaîner des tâches sur plus de 15 minutes de façon autonome. Un bond considérable par rapport aux quelques secondes ou minutes que les modèles précédents pouvaient gérer.
Le problème : les robots oublient trop vite
Jusqu’ici, les robots de Physical Intelligence fonctionnaient sans véritable mémoire persistante. Chaque action était traitée de façon quasi indépendante, ce qui limitait les tâches complexes nécessitant de relier des informations dans le temps. Faire la vaisselle, préparer un repas complet, nettoyer une cuisine de fond en comble : autant de scénarios qui dépassaient les capacités des systèmes existants.
MEM : deux couches de mémoire complémentaires
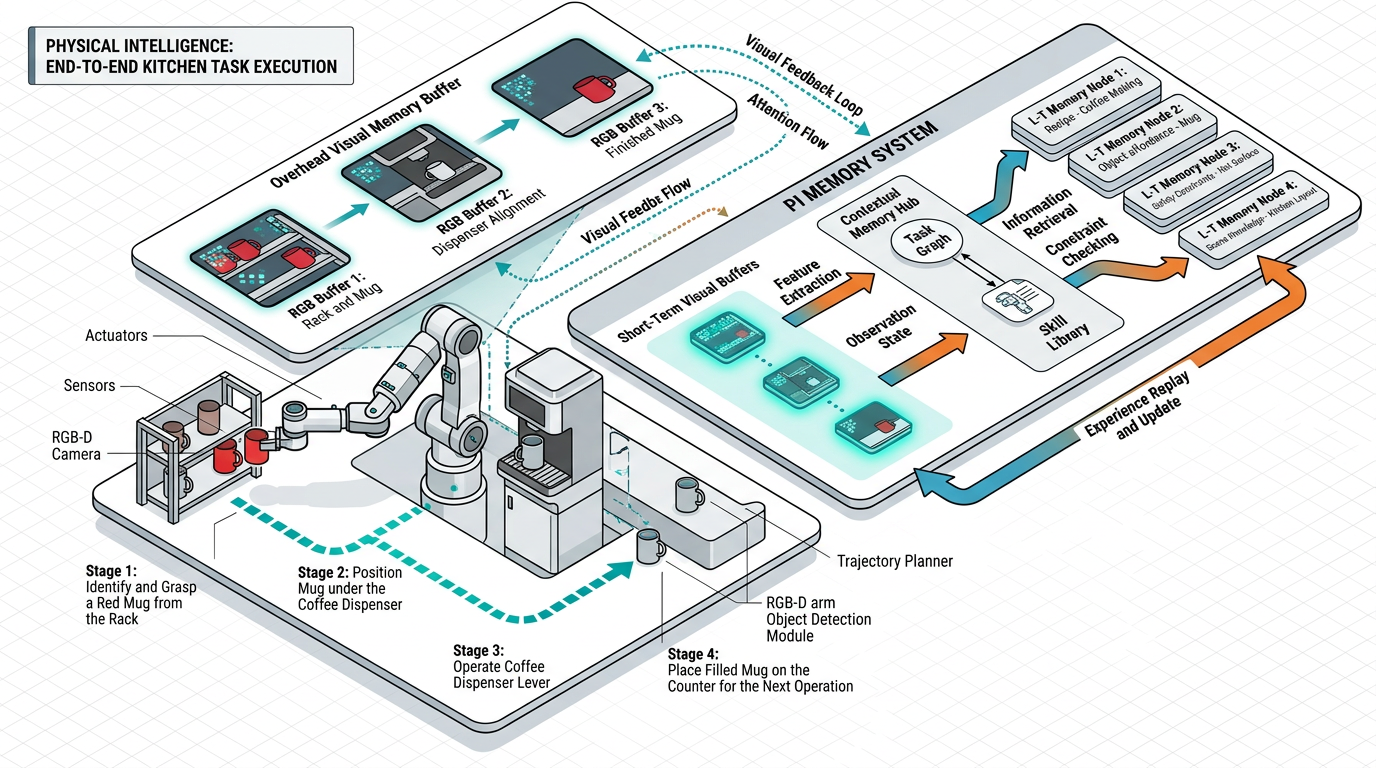
L’architecture MEM repose sur deux types de mémoire qui fonctionnent en parallèle.
Le premier est une mémoire visuelle à court terme. Elle capture et conserve les informations perceptuelles récentes : où se trouvent les objets, quelle est leur position, quels changements viennent de se produire dans l’environnement. C’est la couche qui permet au robot de ne pas « perdre » ce qu’il vient de voir quelques secondes auparavant.
Le second est une mémoire textuelle à long terme. Elle stocke des informations de contexte plus abstraites : des instructions, l’état global de la tâche en cours, des informations sur les étapes déjà accomplies. Concrètement, le robot peut se souvenir qu’il a mis une casserole à chauffer il y a cinq minutes et agir en conséquence.
Des tâches testées en cuisine réelle
PI a validé MEM sur trois scénarios du quotidien : le nettoyage de cuisine, la vaisselle, et la préparation d’un grilled cheese (sandwich fondu). Ces tâches durent chacune plus de 15 minutes et nécessitent de conserver le fil conducteur sur une longue séquence d’actions.
L’exemple le plus parlant est celui de la cuisson : le robot démarre un compte à rebours mental au moment où il pose la casserole sur le feu, puis revient exactement au bon moment pour retirer le plat. Sans mémoire long terme, ce type de synchronisation temporelle est impossible.
Adaptation sans ré-entraînement
Un autre point fort de MEM : l’adaptation in-context. Le robot s’ajuste à de nouvelles situations sans avoir besoin d’être ré-entraîné. Si l’environnement change en cours de tâche (un objet déplacé, un ingrédient manquant), il peut recalibrer son plan d’action à la volée en s’appuyant sur ses deux couches de mémoire.
Cette capacité d’adaptation distingue MEM d’une simple extension de la fenêtre de contexte. Ce n’est pas juste « plus de mémoire », c’est une mémoire organisée selon des échelles de temps différentes.
Un angle différent de la course à la dextérité
Physical Intelligence s’était déjà distinguée en décembre 2025 avec ses performances aux « Jeux Olympiques des robots » (11 défis réussis sur 15 en trois mois). Cette fois, l’enjeu n’est pas la dextérité mais la persistance : un robot qui sait ce qu’il a fait, ce qu’il doit faire, et comment les deux s’articulent.
Pour les applications domestiques et de service, c’est potentiellement plus utile qu’un robot capable de saisir des objets fragiles. Un assistant ménager qui oublie tout toutes les deux minutes reste inutilisable, aussi habile soit-il.
PI reste l’une des startups les plus actives sur la recherche en robotique généraliste. Fondée par Sergey Levine, Chelsea Finn et Danny Driess, elle publie ses travaux sur pi.website tout en développant ses modèles pour des déploiements chez des partenaires industriels.