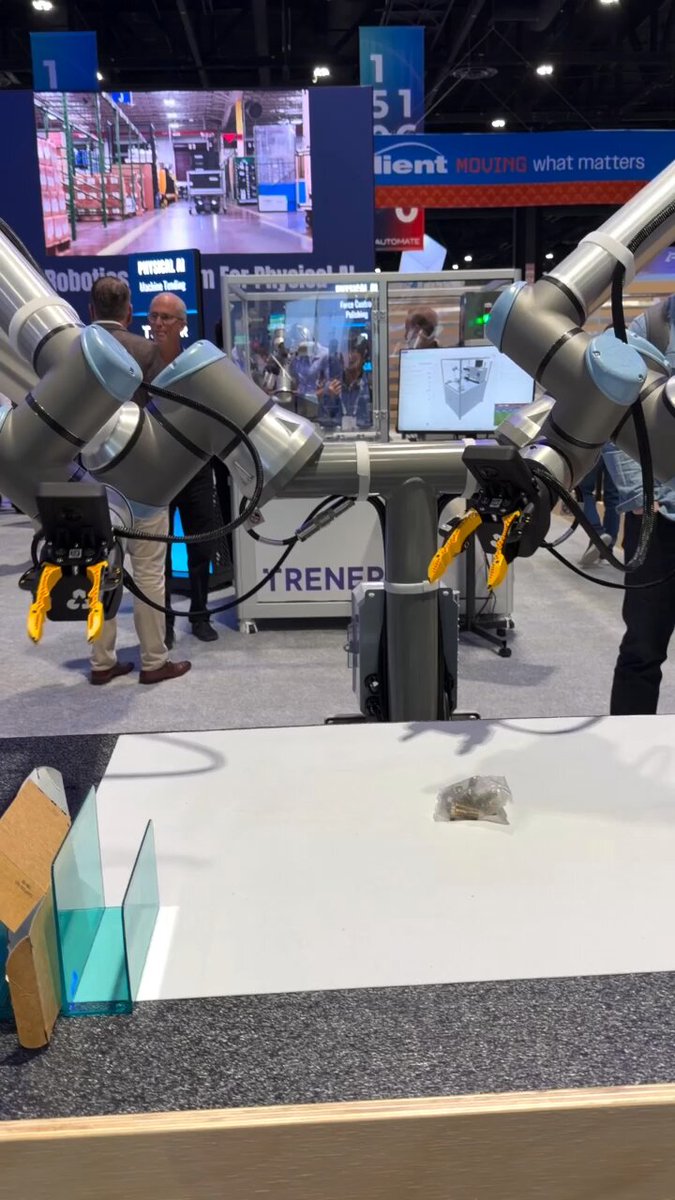
Sur le salon Automate de Chicago, la startup Generalist AI a montré son robot GEN-1 en train de plier des cartons et d’emballer des vis. La démonstration paraît banale, mais elle illustre un saut technique que peu d’acteurs ont franchi : manipuler des objets déformables et imprévisibles, et se corriger en temps réel.
Du carton rigide au carton qui se froisse
Les boîtes utilisées dans la démonstration n’avaient rien de standardisé. Pliures, déformations, configurations différentes : chaque carton se comportait à sa façon. Quand une manipulation échouait, GEN-1 ne se bloquait pas. Il retentait, ajustait son geste et reprenait la tâche en cours de route.
Cette capacité d’adaptation marque la différence avec la génération précédente. Trois mois plus tôt, lors de la conférence GTC de NVIDIA, Generalist AI avait présenté GEN-0. Ce modèle savait déjà manipuler des boîtes, mais seulement des objets rigides et prévisibles. GEN-1 gère désormais des matériaux souples au comportement chaotique, ce qui ouvre la voie à des tâches industrielles bien plus variées.
500 000 heures de données réelles
Le secret de cette progression tient à la donnée. Generalist AI affirme avoir entraîné GEN-1 sur 500 000 heures de manipulation dextre captées dans le monde réel, et non en simulation. C’est un pari différent de celui de nombreux concurrents qui misent sur des environnements virtuels pour générer des volumes massifs à moindre coût.
Le raisonnement de l’entreprise est direct. Plus on accumule de données réelles de qualité, meilleure devient la compréhension de la physique par le robot, et meilleurs deviennent son comportement de reprise après échec et sa capacité à généraliser. C’est l’application aux robots des lois d’échelle qui ont nourri les grands modèles de langage : davantage de données de bonne qualité produisent de meilleures performances.
Un terrain de jeu encore au début
Generalist AI insiste sur un point : l’entreprise n’a pas encore atteint son régime de croisière. Elle commence seulement à observer ce qui se passe quand on pré-entraîne un modèle sur des quantités massives de données issues de vrais robots. Si la tendance se confirme, le temps nécessaire pour obtenir une démonstration fonctionnelle se réduit nettement d’une génération à l’autre.
L’enjeu dépasse le pliage de cartons. La manipulation d’objets déformables reste l’un des verrous majeurs de la robotique appliquée, dans la logistique comme dans l’industrie manufacturière. Un modèle capable de gérer l’imprévu et de se corriger seul rapproche les robots polyvalents des chaînes de production réelles, là où rien n’est jamais parfaitement calibré.