Et si vous pouviez tester un bras robotique en ligne, sans imprimer la moindre pièce ni acheter un seul servo ? C’est exactement ce que propose NormaCore avec son nouveau ElRobot Playground, un simulateur web qui ouvre la robotique maker à tous.
ElRobot : un bras robotique pour les makers
ElRobot est un bras robotique open-source conçu pour être fabriqué à domicile. Le projet, développé par NormaCore et disponible sur GitHub, repose sur une philosophie simple : la robotique doit être accessible à toute personne disposant d’une imprimante 3D et d’une poignée de servomoteurs.
Jusqu’ici, se lancer dans l’impression d’un bras robotique impliquait un engagement aveugle : imprimer les pièces, assembler, tester — et découvrir seulement à la fin si l’amplitude de mouvement convenait à votre cas d’usage.
Le Playground : tester avant de fabriquer
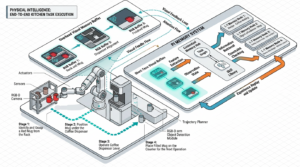
NormaCore vient de lancer une solution élégante à ce problème : un environnement web interactif baptisé ElRobot Playground. Accessible directement depuis un navigateur sur normacore.dev, il charge le modèle URDF du robot et propose un visualiseur 3D de joints complet avec contrôles interactifs.
L’objectif est clair :
- Visualiser le bras dans l’espace 3D depuis son navigateur
- Tester l’amplitude de chaque articulation avant toute impression
- Vérifier si le robot correspond à son projet avant d’investir temps et filament
Voir sur X — NormaCore : ElRobot Playground, testez le bras robotique open-source en ligne
Une tendance de fond : la robotique maker se démocratise
L’initiative s’inscrit dans une tendance plus large. Ces derniers mois, plusieurs projets open-source ont émergé pour rendre la robotique physique accessible aux amateurs : LeRobot de HuggingFace pour l’apprentissage par imitation, le Mercury Drone dont nous avons parlé récemment, ou encore les bras robotiques du laboratoire de Stamford Robotics disponibles en licence ouverte.
Ce qui distingue ElRobot Playground, c’est son approche « try before you build » : la barrière à l’entrée n’est plus matérielle, mais cognitive. Il suffit d’un navigateur pour comprendre si ce robot peut répondre à vos besoins.
Comment démarrer ?
- Accéder à normacore.dev/elrobot-urdf/
- Attendre le chargement du modèle URDF (quelques secondes)
- Utiliser les contrôles de joints pour tester les mouvements
- Si le bras correspond à votre projet : récupérer les fichiers sur GitHub et imprimer
Une démarche pédagogique qui pourrait convaincre une nouvelle génération de makers de passer à la robotique physique, bien au-delà des simulations purement logicielles.
Sources : @norma_core_dev (X), NormaCore.dev