Menlo Research, la startup californienne derrière le projet Asimov, a annoncé ce 16 mars l’ouverture complète de la conception de son robot humanoïde v1. Specs des actionneurs, fichiers de design mécaniques, assets de simulation : tout est publié sur GitHub, librement accessible à quiconque veut construire ou modifier son propre humanoïde.
De la vente d’un kit à la libération totale du design
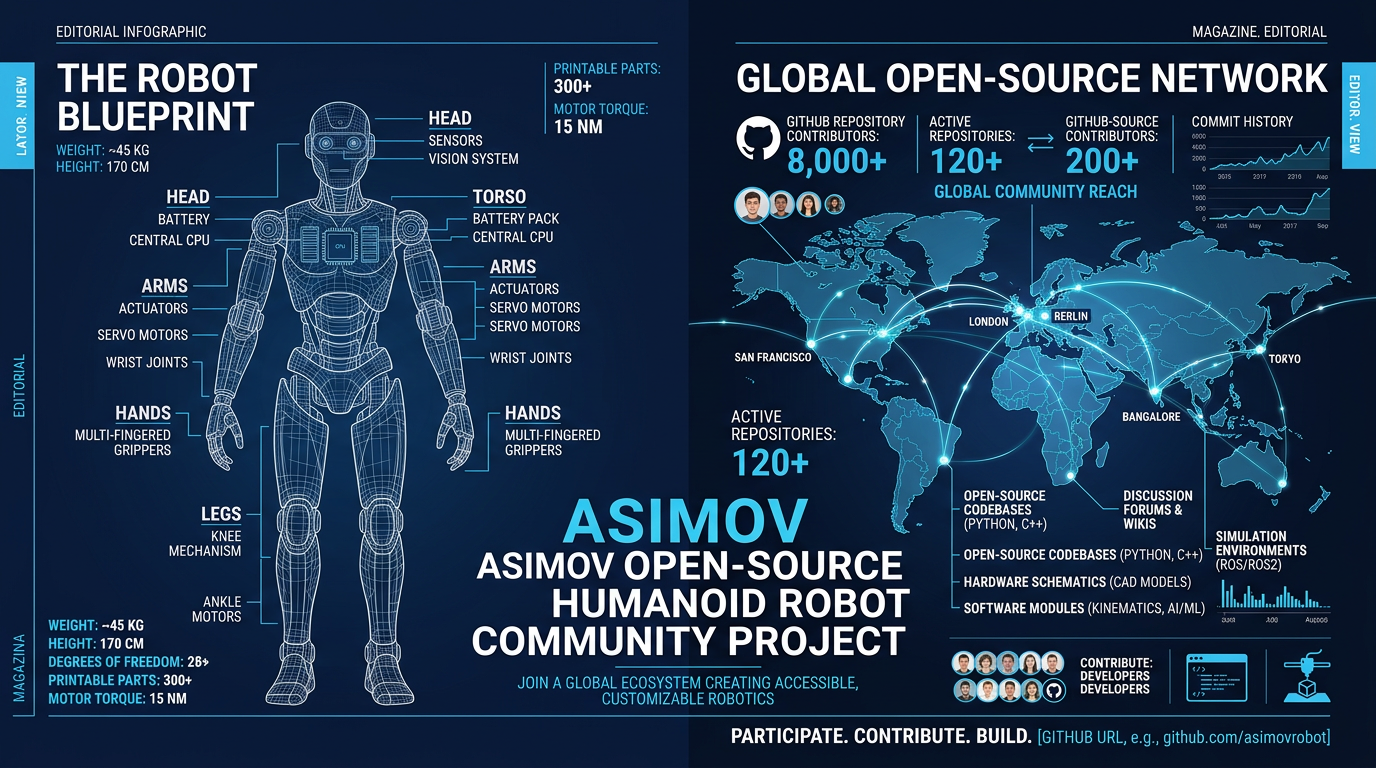
Il y a dix jours, Asimov proposait encore un kit à 15 000 dollars pour permettre aux bricoleurs et chercheurs de construire leur propre humanoïde. Ce modèle commercial cohabitait avec la nature open-source du projet, mais restait une barrière pour beaucoup. L’annonce de ce matin va plus loin : plus besoin d’acheter quoi que ce soit. La conception complète du v1 est publiée sur github.com/asimovinc.
C’est une étape majeure dans l’histoire du projet. La version v0 publiée en 2025 n’incluait que les jambes. Le v1 est le corps entier : torse, bras, mains, tête, actionneurs. Les fichiers de simulation permettent de tester des politiques de locomotion et de manipulation dans un environnement virtuel avant de passer au matériel physique.
Un projet porté par une communauté de 1000 membres
Asimov s’est constitué une communauté active de plus de 1000 membres sur Discord depuis son lancement. Des équipes dans plusieurs pays utilisent déjà la v0 pour leurs recherches en locomotion bipède. Le v1 devrait accélérer ce mouvement en offrant un corps complet sur lequel développer des algorithmes de manipulation.
L’objectif affiché par Menlo Research est clair : « libérer le robot ». Entendez par là, sortir les humanoïdes des laboratoires propriétaires et des startups bien financées pour les rendre accessibles à l’ensemble de la communauté de recherche mondiale. Sur ce point, Asimov s’inscrit dans une tendance plus large qui inclut ORCA (mains robotiques ETH Zurich) et d’autres projets hardware open-source.
Pourquoi c’est différent des autres projets open-source
Les projets de robots humanoïdes open-source existaient avant Asimov, mais beaucoup se heurtent au problème de la fabricabilité : des designs théoriquement ouverts mais impossibles à reproduire sans équipement industriel spécialisé. Asimov a été pensé dès le départ avec des contraintes de production accessibles, des pièces disponibles mondialement, sans délai de livraison bloquant.
Les fichiers de simulation publiés aujourd’hui sont également importants pour la recherche en IA physique. Ils permettent d’entraîner des politiques de contrôle dans un jumeau numérique précis du robot avant tout test physique, ce qui réduit drastiquement les cycles de développement. Asimov indique que son prochain chantier est le volet logiciel, qui sera lui aussi publié en open-source.


