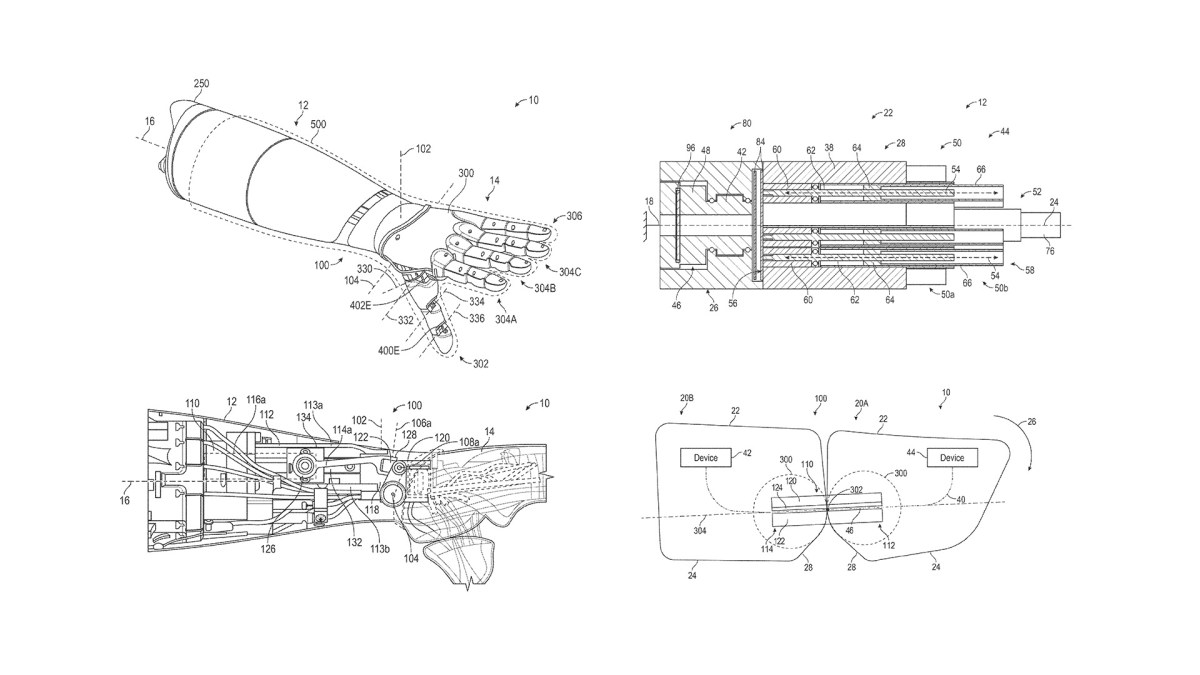
Tesla a publié jeudi 16 avril quatre brevets internationaux décrivant pour la première fois l’architecture mécanique de son robot humanoïde Optimus dans sa version 3. Les documents couvrent la main, le poignet, l’avant-bras et l’assemblage des articulations. Ils dessinent un design pensé pour la production en série, et non plus pour le prototype.
L’innovation centrale tient en une phrase : Tesla déplace les actionneurs dans l’avant-bras et pilote les doigts par câbles, à la manière des tendons humains. Chaque doigt dispose de quatre degrés de liberté, le poignet en ajoute deux, pour un total de 22 degrés de liberté sur l’ensemble main et poignet.
Une main entraînée à distance par câbles
Le brevet principal, intitulé « Mechanically Actuated Robotic Hand », détaille un système de trois fins câbles flexibles par doigt. Ces tendons partent des moteurs logés dans l’avant-bras, traversent le poignet, puis s’insèrent dans des canaux usinés à l’intérieur des phalanges. Le routage est volontairement asymétrique : certains câbles passent derrière les articulations, d’autres devant. Résultat, chaque doigt peut plier indépendamment, sans transmettre de mouvement parasite à ses voisins.
Cette approche imite l’anatomie humaine : la majorité des muscles qui contrôlent nos doigts se trouvent dans l’avant-bras, pas dans la main. Concrètement, la main d’Optimus reste légère et compacte, ce qui réduit son inertie et autorise des gestes plus rapides.
Le poignet, point critique du design
Le second brevet décrit une zone de transition au niveau du poignet. Les câbles passent d’un empilement latéral côté avant-bras à un empilement vertical côté main. Cette géométrie limite l’allongement des tendons, le frottement et les couplages parasites entre l’inclinaison et la rotation du poignet.
Ces phénomènes sont précisément les talons d’Achille des systèmes à câbles plus simples : ils provoquent des mouvements imprécis et saccadés. Tesla revendique ici un poignet capable de combiner plusieurs axes de rotation tout en restant fluide, indispensable pour visser, manipuler des objets fragiles ou plier du linge.
Un signal industriel autant que technique
Deux brevets complémentaires, « Robotic Appendage » et « Joint Assembly for Robotic Appendage », décrivent l’assemblage complet du membre et la conception des articulations. On y trouve des surfaces de contact courbes associées à des éléments composites flexibles, censés améliorer la durabilité et faciliter le montage à grande échelle.
Elon Musk a souvent répété que la main représentait à elle seule environ 60 % de la difficulté technique d’Optimus. Il avait comparé le défi à un travail « plus dur que le Cybertruck ou le Model X, quelque part entre le Model X et Starship ». La main humaine compte 27 à 28 degrés de liberté, contre 22 désormais revendiqués pour Optimus V3, soit le ratio le plus élevé annoncé sur un humanoïde commercial.
Les brevets ont été déposés le jour même de l’événement « We, Robot » d’octobre 2024, mais Tesla a attendu près de 18 mois avant leur publication. Le calendrier coïncide avec l’accélération industrielle annoncée à Shanghai et Fremont. Tesla cherche désormais à passer du prototype au robot fabriqué par millions, et la main reste le composant le plus délicat à industrialiser, faute de chaîne d’approvisionnement existante pour ce niveau de précision.
Pour les concurrents (Figure, 1X, Unitree, AgiBot), la barre est haussée. Tesla ne dévoile pas seulement un design, il publie le mode d’emploi d’une main humanoïde fabriquable en grande série.
Source : Teslarati et EV Magazine.