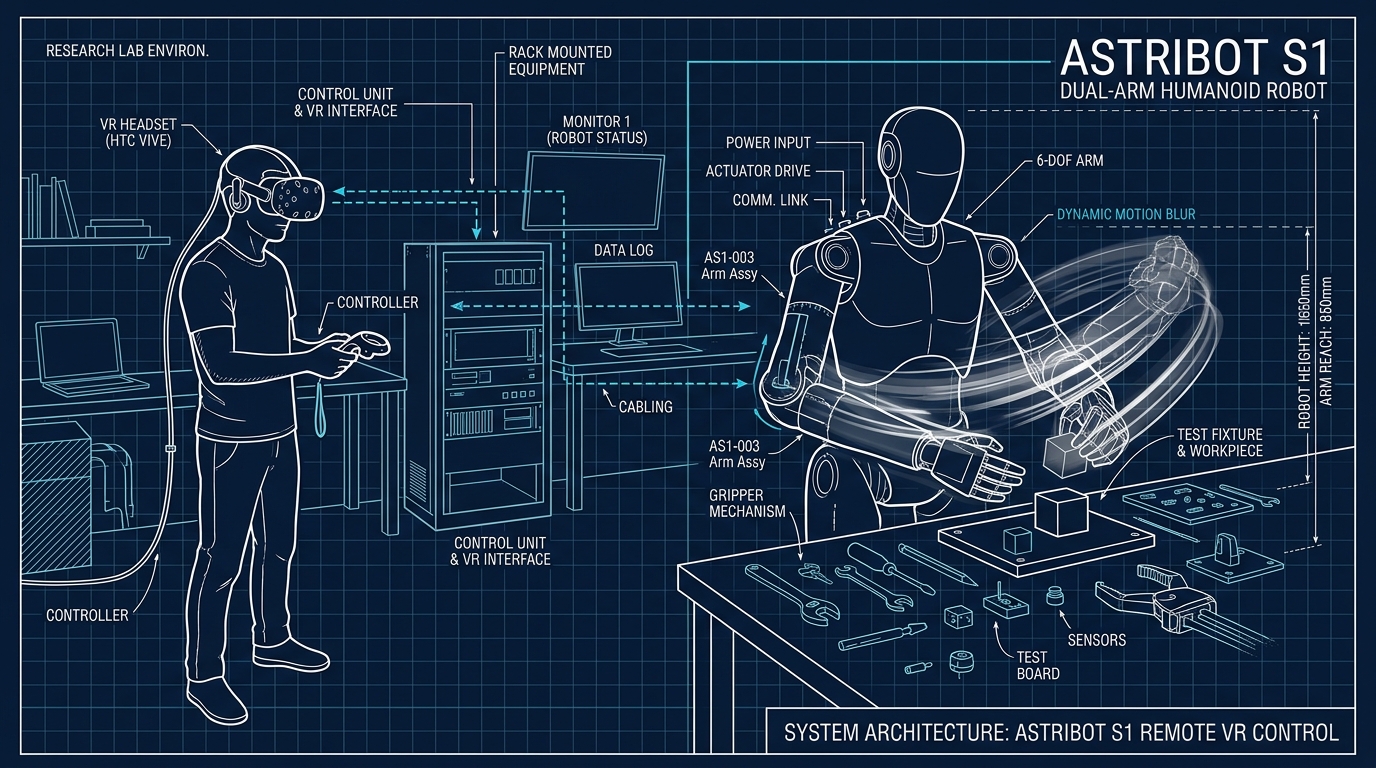
Lors de la conférence ICRA, le constructeur chinois Astribot a montré son robot S1 enchaîner une boucle complète : autonomie par modèle vision-langage-action, reprise en main humaine en quelques millisecondes et téléopération longue distance. Le robot exécute une tâche seul, laisse un opérateur reprendre la main via un casque VR pour corriger un geste, puis rend le contrôle sans rupture visible.
Quand l’humain reprend la main en quelques millisecondes
Le cœur de la démonstration tient dans cette transition. Un robot autonome qui réussit une tâche dans un environnement contrôlé, on en voit beaucoup. Mais quand la situation déraille, la plupart se bloquent ou échouent. Astribot propose une réponse : laisser un humain intervenir instantanément, corriger le mouvement, puis repasser en mode autonome.
La latence se mesure en millisecondes, ce qui rend la bascule quasi invisible. Le matériel embarqué joue ici un rôle décisif. Une réponse plus rapide, une exécution plus stable et une reproduction des mouvements plus propre permettent à l’opérateur de piloter le robot comme une extension de son propre corps.
Shenzhen-Vienne, 9 000 kilomètres de contrôle
La partie téléopération impressionne tout autant. Astribot a piloté son S1 depuis Shenzhen alors que le robot se trouvait à Vienne, soit environ 9 000 kilomètres de distance. L’objectif affiché : un mouvement fluide, un contrôle continu et une sensation de latence proche de zéro malgré la distance.
Ce type de pilotage à distance ouvre des perspectives concrètes. Maintenance sur site dangereux, intervention dans des environnements hostiles ou simple collecte de données de qualité depuis n’importe où dans le monde.
La vraie course : la boucle de données
Au-delà de la prouesse technique, Astribot met le doigt sur ce qui compte vraiment. L’IA exécute la tâche, l’humain corrige les échecs, et chaque correction devient un signal d’entraînement de meilleure qualité. La prochaine exécution autonome s’améliore d’autant.
C’est la mécanique qui structure aujourd’hui la robotique : données, modèle, déploiement, encore plus de données. Le robot qui collecte le plus de corrections humaines de qualité progresse le plus vite. Astribot fait le pari que cette boucle, plus que le matériel seul, décidera des gagnants de la décennie.